Lab Reports

Lab 1: Artemis Setup
Setting up the Artemis Nano board and running basic examples.
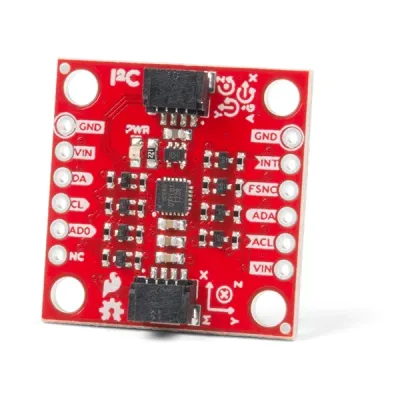
Lab 2: IMU
Setting up the IMU, filtering it, and sending data via Bluetooth test.
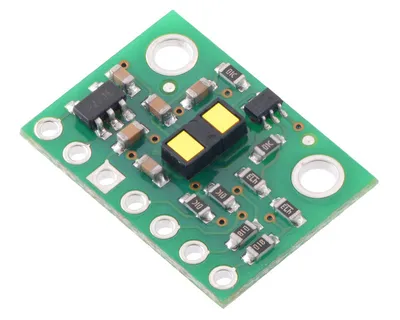
Lab 3: ToF
Setting up the ToF sensors, and sending data via Bluetooth test.
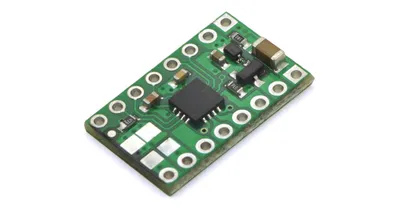
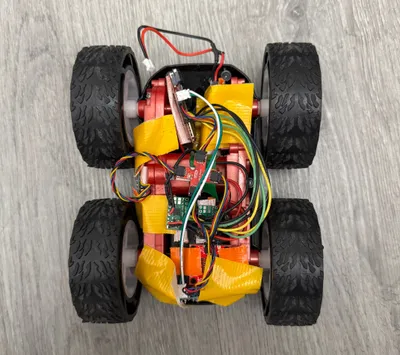
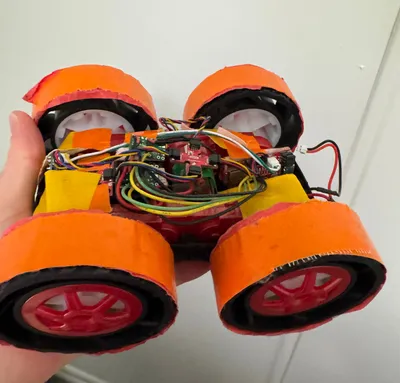
Lab 4: Motor Drivers
Installing the motor drivers in the car and integrating everything

Lab 5: ToF PID Control
Using PID controllers with the ToF sensors to control the car
Lab 6: IMU PID Control
Using PID with the IMU to control the angle of the car
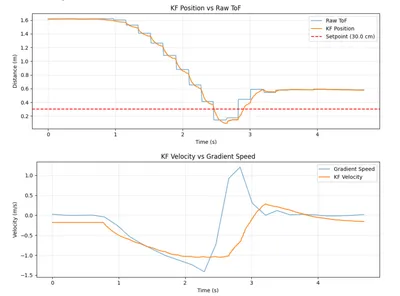
Lab 7: Kalman Filter
Developing a Kalman Filter, simulating it in Python, and implementing it on the car
Lab 8: Stunts
Performing a drift stunt with the car
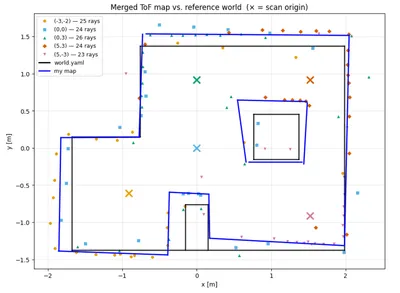
Lab 9: Mapping
Mapping a static room

Lab 10: Grid Localization using Bayes Filter (simulation)
Running the Bayes filter in simulation
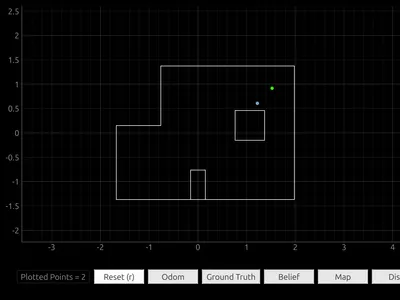
Lab 11: Grid Localization using Bayes Filter (real)
Running the Bayes filter on the robot

Lab 12: Inverted Pendulum
Building an inverted pendulum controller